
2024.5.23
ブログ

東英グループのドローン開発プロジェクトは、来月出展予定の「ものづくりODM/EMS展」での実機お披露目に向けて、着々と開発を進めております。
ドローン開発の難所として、「ホバリング」が挙げられます。空中で飛行姿勢を安定させることで、ドローンを活用した空撮や高所作業、データ収集などを効果的に行うことができます。
今回は「ホバリング」における調整のポイントについて、調整前後の比較動画付きでご紹介いたします。
■ドローンのホバリングとは
①ホバリングのしくみ
②なぜホバリングが不安定になるのか
③ホバリングを安定させるためのポイント
■ドローンの飛行姿勢を制御する3つの基本的回転軸(Roll・Pitch・Yaw)
■ホバリングを安定させるための調整(PID制御の例)
■ホバリング調整前後の比較動画
■東英グループは、お客様のモノづくり企画から設計開発・量産までをトータルサポート!
【テスト飛行動画公開!】ドローン開発プロジェクト -連載①プロジェクト始動-
ドローン開発プロジェクト – 番外編① ホバリングとは? –
ドローンが飛行中に、空中のある一定高度で同じ位置にとどまることを「ホバリング」と呼びます。
ドローンやヘリコプターの機体が空中で高度を保ったまま停滞する動作に見覚えがある方も多いでしょう。
また、ハチドリなどの鳥が蜜を吸うために高速で羽ばたいている写真を見たことがある人もいるかもしれません。

空中を飛ぶドローンがピタッとその場に動かずホバリングできるのには、どんな機能が必要だと思いますか?
ドローンのホバリングは、複数の要素が密接に組み合わさって実現できます。
機体がホバリングの状態をキープするためにまず重要になるのが、「姿勢制御」と「位置制御」という2つの機能です。
姿勢制御機能は、加速度センサーやジャイロセンサーなどのセンサーが飛行中のドローンの姿勢を検知して、その情報をもとに機体の飛行制御を行い、ドローンの姿勢を保つ機能のことです。
位置制御機能は、いまや私たちにとっても身近なスマートフォンのナビやカーナビなどでよく知られているGPS、あるいはビジョンセンサーなどを活用して、より正確に飛行中の機体の位置を把握することでドローンの飛行位置を保つ機能を指します。
これらの機能に加えて、プロペラやモータの回転速度の微調整や操縦者の技術などのさまざまな要因が組み合わさって、空中の機体のバランスを保ちつつ安定した浮遊位置の維持が可能になっています。
ホバリングの状態は、センサーやGPSの正確な受信、適切なPID設定、機体の整備などにより安定飛行が実現します。
ホバリングが不安定になる原因には、飛行環境によってセンサーやGPS受信が不安定になり、機体の状態を正しく把握できないことや、機体のバランスが正常でないことなどがあります。
このような不安定な状態では、正確な位置を把握することができず、ドローンの安定飛行が困難になります。
また、ドローンにあらかじめ組み込まれている姿勢制御機能は、繰り返し飛行を行ううちに徐々にズレが生じてくるため、定期的に確認しズレが大きくならないうちにキャリブレーション(調整)を行うことが不可欠となります。
ホバリングを安定させるためのポイントとして、以下の2点が挙げられます。
1. 筐体の軽量化
剛性と各部品の配置と軽量化のバランスを取って筐体の設計を行う
2. 筐体に合ったセンサーのパラメーター設定
センサーのパラメーター設定では、各センサーのパラメーターを調整し、自身の位置や向きを正しく補正できるよう調整を行う
各調整をくりかえすことで、安定したホバリングが可能になります。以下で詳しく解説します。
ドローンの飛行姿勢を制御するためには、ドローンの姿勢を表す3つの基本的な回転軸(Roll・Pitch・Yaw)があります。
これらは、ドローンの操縦において非常に重要な要素であり、それぞれ異なる方向の動きをコントロールします。
・Roll (ロール)
ドローンがその前後軸(機体の長さ方向の軸)周りで横に傾くことを指します。
これにより、ドローンは左または右に傾きながら横に移動することができます。
・Pitch (ピッチ)
ドローンがその横軸(機体の幅方向の軸)周りで前後に傾くことを指します。
これにより、ドローンは前進または後進します。前に傾くと前進し、後ろに傾くと後退します。
・Yaw (ヨー)
ドローンがその垂直軸(上下の軸)周りで回転することを指します。
これにより、ドローンは左または右に顔を向けることができます。
ドローンのホバリングを安定させるための調整には、以下のようなステップが含まれます。
1.センサーキャリブレーション
2.PIDゲインの調整
3.メカニカルチェックと調整
4.フライトテストとフィードバック
調整の一部として、PID制御の例を示します。
ドローンの動作を安定化させ、正確に制御するためにはPID制御(比例・積分・微分制御)が重要です。PID制御は、ドローンを含む多くの自動制御システムで使用される一般的なフィードバックループ制御アルゴリズムです。
・比例制御(Proportional, P)
比例制御は、現在の誤差(目的位置や状態と現在位置や状態との差)に比例した制御を行います。
誤差が大きいほど、より強い制御信号(たとえばモーターへの電力)が出力されます。
・積分制御(Integral, I)
積分制御は、過去の誤差を時間にわたって積算し、この積算値を用いて制御信号を調整します。
これにより、定常状態の誤差(システムが安定している時にも続く小さな誤差)を解消するのに役立ちます。
・微分制御(Derivative, D)
微分制御は、誤差の変化率(誤差がどれくらい迅速に変わっているか)にもとづいて制御を行います。
これは、ドローンの動きが急に変わった場合に、適切に反応してオーバーシュートを防ぐのに役立ちます。
これら3つの制御を組み合わせることで、ドローンは目標に対して正確かつ効率的に動作することが可能となり、さまざまな状況での安定飛行が実現します。
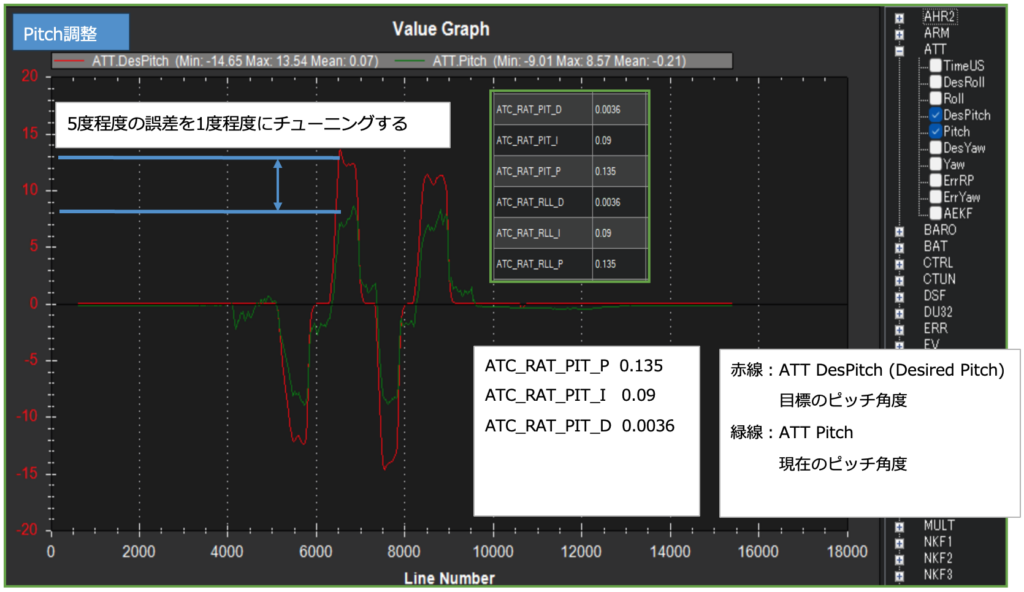
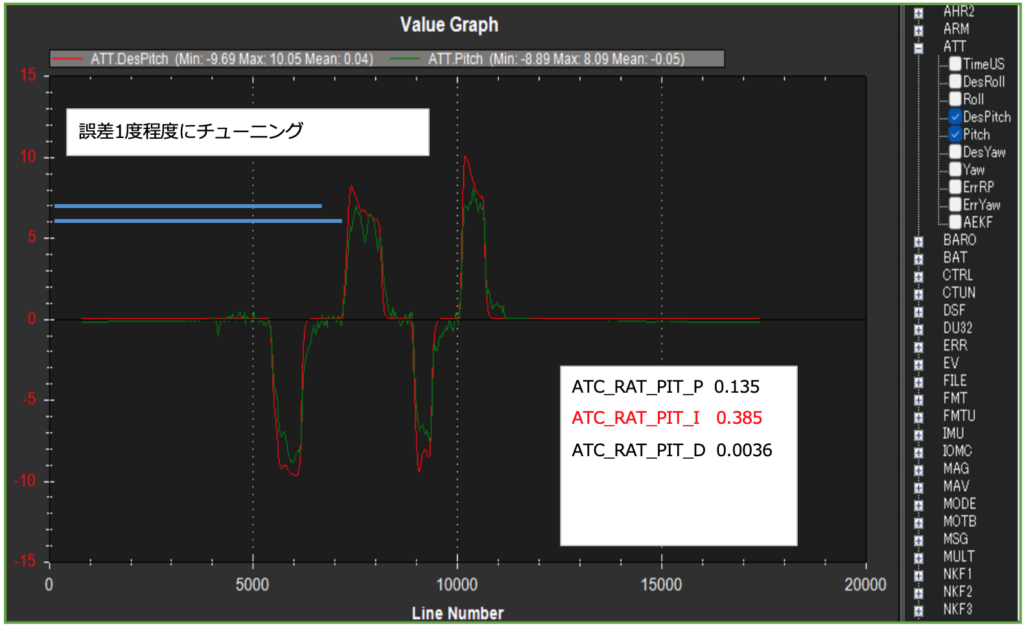
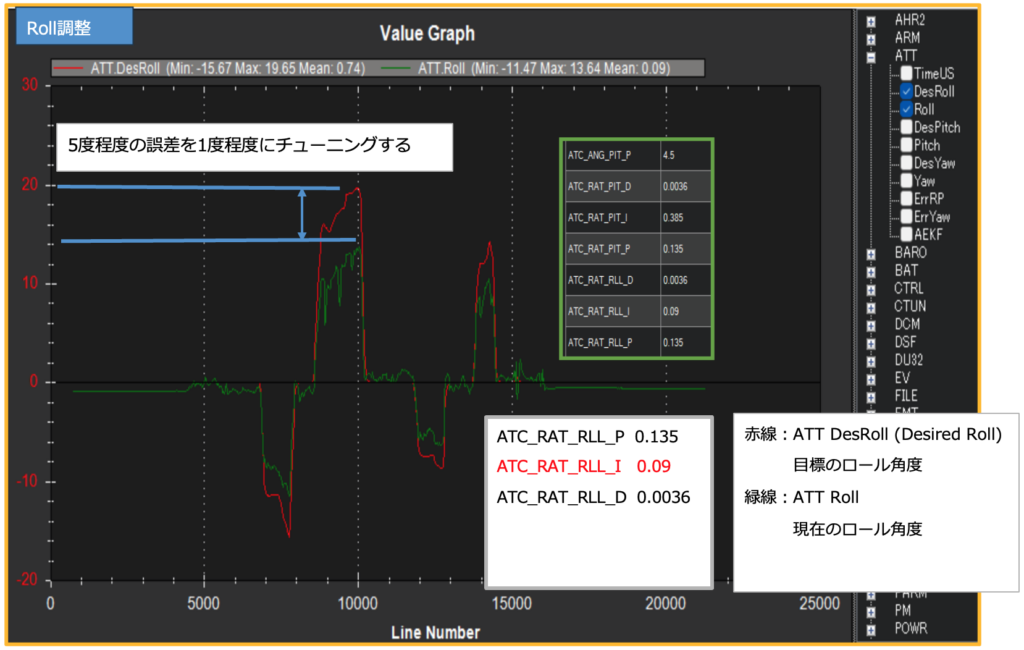
以下では、調整の一例として、ホバリングに特に重要なPitch調整、Roll調整のグラフをもとに解説します。
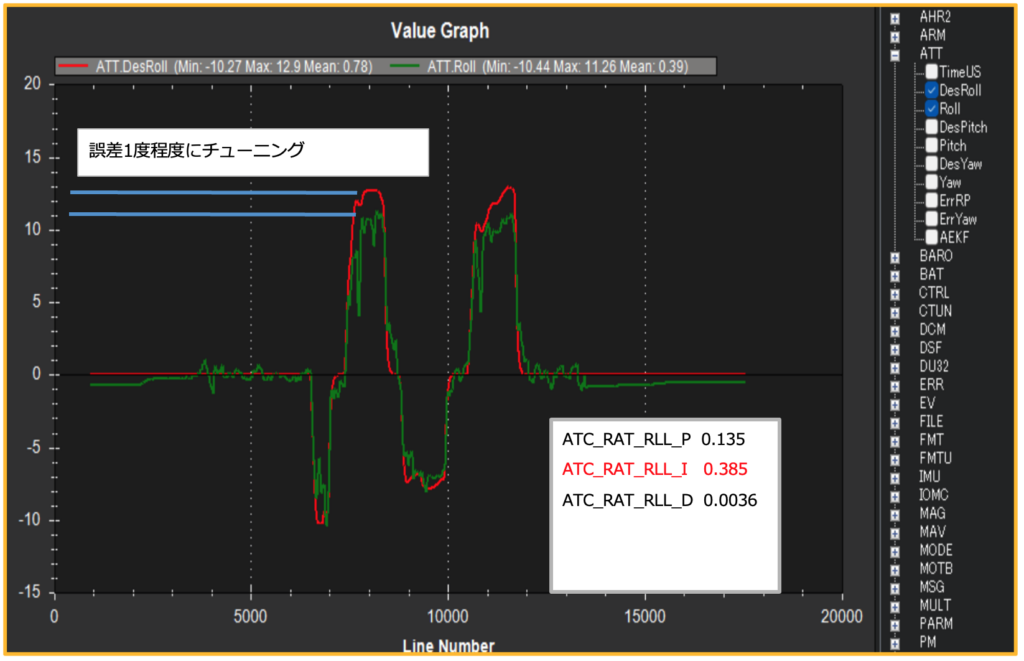
本記事では、弊社にてホバリングの安定性を図る調整を行った「前後比較動画」を特別に公開いたします。
比較動画では、筐体が同じなので違いを感じにくいかもしれません。しかし、弊社での開発過程では、比較動画はパラメーターの調整で安定しています。
一本筋が通ったかのように安定してますね!
 東 英太郎
東 英太郎
着地も静かですね!不安定な着地は、機体の損傷や故障にもつながりかねないので、注意が必要です。
 丹戸 春樹
丹戸 春樹
東英グループは、お客様のモノづくり企画から設計開発、量産にいたるまでのトータルサポートを行っています。
▼併せて読みたい
開発規模・予算・品質などご要望に合わせた提案で企画実現サポート!東英グループ「試作(プロトタイピング)」の3つの強み
新規設計や既存品改良、アイディア製品の具現化をサポート!東英グループ「設計開発」の4つの強み
多品種少量生産でも低コスト&高品質を実現!東英グループ「量産」の3つの強み
投資・開発・量産までトータルサポート!東英グループ「ベンチャー支援」の3本柱
アイディアをカタチにする「設計・開発」および、最適なモノづくりをご提案する「製造・調達」のプロ集団が企画段階から量産まで、お客様のプロジェクトに伴走します。
モノづくり工程に関するお困りごとがありましたら、お気軽にお問い合わせください。
貴社の「カタチにしたい」を叶える最大限のサポートをさせていただきます。
最新の記事

「メディカルショージャパン&ビジネスエキスポ2024」に出展しました!

【2024.6.19〜6.21開催】ものづくりODM/EMS展@東京ビッグサイト[E35-48]ブースでお待ちしております!
【2024.6.19〜6.21@東京ビッグサイト】ものづくりODM/EMS展[東京]に出展します!

【調整比較動画公開!】ホバリング安定のポイント-ドローン開発プロジェクト -連載②
ドローン開発プロジェクト – 番外編① ホバリングとは? –
よく読まれている記事

飛行も着地も不安定ですね。